|
|

|

|
| e-Pub |
Section: New Results
Advanced Sensor-Based Control
Sensor-based Trajectory Planning for quadrotor UAVs
Participants : François Chaumette, Paolo Robuffo Giordano.
In the context of developing robust navigation strategies for quadrotor UAVs with onboard cameras and IMUs, we considered the problem of planning minimum-time trajectors in a cluttered environment for reaching a goal while coping with actuation and sensing constraints [25]. In particular, we considered a realistic model for the onboard camera that considers limited fov and possible occlusions due to obstructed visibility (e.g., presence of obstacles). Whenever the camera can detect landmarks in the environment, the visual cues can be used to drive a state estimation algorithm (a EKF) for updating the current estimation of the UAV state (its pose and velocity). However, beacause of the sensing constraints, the possibility of detecting and tracking the landmarks may be lost while moving in the environment. Therefore, we proposed a robust “perception-aware” planning strategy, based on the bi-directional A planner,
UAVs in Physical Interaction with the Environment
Participants : Quentin Delamare, Paolo Robuffo Giordano.
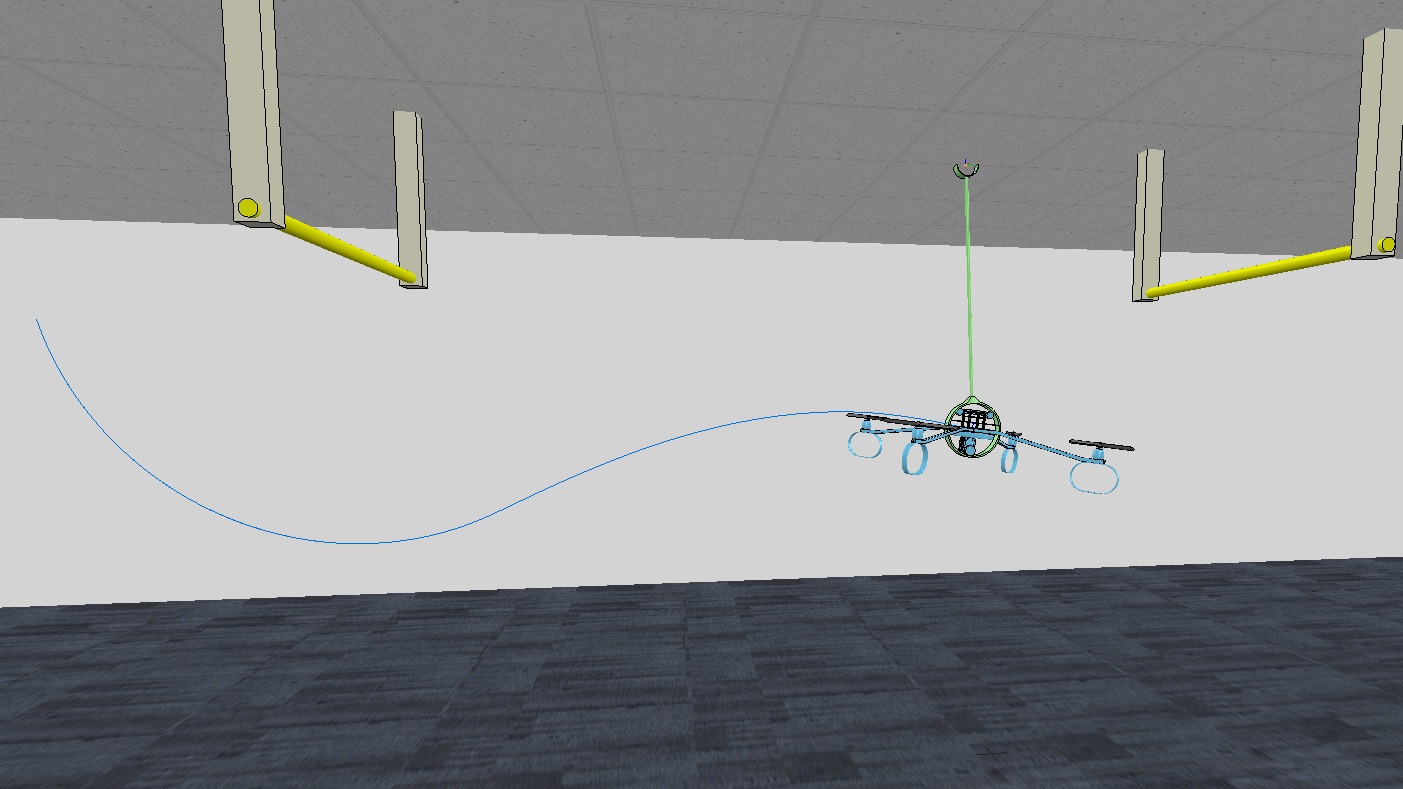
Most research in UAVs deals with either contact-free cases (the UAVs must avoid any contact with the environment), or “static” contact cases (the UAVs need to exert some forces on the environment in quasi- static conditions, reminiscent of what has been done with manipulator arms). Inspired by the vast literature on robot locomotion (from, e.g., the humanoid community), in this research topic we aim at exploiting the contact with the environment for helping a UAV maneuvering in the environment, in the same spirit in which we humans (and, supposedly, humanoid robots) use our legs and arms when navigating in cluttered environments for helping in keeping balance, or perform maneuvers that would be, otherwise, impossible. During last year we have considered the modeling, control and trajectory planning problem for a planar UAV equipped with a 1 DoF actuated arm capable of hooking at some pivots in the environment. This UAV (named MonkeyRotor) needs to “jump” from one pivot to the next one by exploiting the forces exchanged with the environment (the pivot) and its own actuation system (the propellers), see Fig. 8(a). We are currently finalizing a real prototype (Fig. 8(b)) for obtaining an experimental validation of the whole approach [1].
|

Trajectory Generation for Minimum Closed-Loop State Sensitivity
Participants : Pascal Brault, Quentin Delamare, Paolo Robuffo Giordano.
The goal of this research activity is to propose a new point of view in addressing the control of robots under parametric uncertainties: rather than striving to design a sophisticated controller with some robustness guarantees for a specific system, we propose to attain robustness (for any choice of the control action) by suitably shaping the reference motion trajectory so as to minimize the state sensitivity to parameter uncertainty of the resulting closed-loop system. During this year, we have extended the existing minimization framework to also include the notion of “input sensitivity”, which allows to obtain trajectories whose realization (in perturbed conditions) leaves the control inputs unchanged to the largest extent. Such a feature is relevant whenever dealing with, e.g., limited actuation since it guarantees that, even under model perturbations, the inputs do not deviate too much from their nominal values. This novel input sensitivity has been combined with the previously introduced notion of state sensitivity and validated both via monte-carlo simulations and experimentally with a unicycle robot in a large number of tests [1].
Visual Servoing for Steering Simulation Agents
Participants : Axel Lopez Gandia, Eric Marchand, François Chaumette, Julien Pettré.
This research activity is dedicated to the simulation of human locomotion, and more especially to the simulation of the visuomotor loop that controls human locomotion in interaction with the static and moving obstacles of its environment. Our approach is based on the principles of visual servoing for robots. To simulate visual perception, an agent perceives its environment through a virtual camera located in the position of its head. The visual input is processed by each agent in order to extract the relevant information for controlling its motion. In particular, the optical flow is computed to give the agent access to the relative motion of visible objects around it. Some features of the optical flow are finally computed to estimate the risk of collision with obstacle. We have established the mathematical relations between those visual features and the agent's self motion. Therefore, when necessary, the agent motion is controlled and adjusted so as to cancel the visual features indicating a risk of future collision [22], [46].
Strategies for Crowd Simulation Agents
Participants : Wouter Van Toll, Julien Pettré.
This research activity is dedicated to the simulation of crowds based on microscopic approaches. In such approaches, agents move according to local models of interactions that give them the capacity to adjust to the motion of neighbor agents. These purely local rules are not sufficient to produce high-quality long term trajectories through their environment. We provide agents with the capacity to establish mid-term strategies to move through their environment, by establishing a local plan based on their prediction of their surroundings and by verifying regularly this prediction remains valid. In the case validity is not checked, planning a new strategy is triggered [55].
Study of human locomotion to improve robot navigation
Participants : Florian Berton, Julien Bruneau, Julien Pettré.
This research activity is dedicated to the study of human gaze behaviour during locomotion. This activity is directly linked to the previous one on simulation, as human locomotion study results will serve as an input for the design of novel models for simulation. We are interested in the study of the activity of the gaze during locomotion that, in addition to the classical study of kinematics motion parameters, provides information on the nature of visual information acquired by humans to move, and the relative importance of visual elements in their surroundings [36].
Robot-Human Interactions during Locomotion
Participants : Javad Amirian, Fabien Grzeskowiak, Marie Babel, Julien Pettré.
This research activity is dedicated to the design of robot navigation techniques to make them capable of safely moving through a crowd of people. We are following two main research paths. The first one is dedicated to the prediction of crowd motion based on the state of the crowd as sensed by a robot. The second one is dedicated to the creation of a virtual reality platform that enables robots and humans to share a common virtual space where robot control techniques can be tested with no physical risk of harming people, as they remain separated in the physical space. This year, we have delivered techniques for the short term prediction of human locomotion trajectories [34], [35] and robot-human collision avoidance [39].
Visual Servoing for Cable-Driven Parallel Robots
Participant : François Chaumette.
This study is done in collaboration with IRT Jules Verne (Zane Zake, Nicolo Pedemonte) and LS2N (Stéphane Caro) in Nantes (see Section 7.2.2). It is devoted to the analysis of the robustness of visual servoing to modeling and calibration errors for cable-driven parallel robots. The modeling of the closed loop system has been derived, from which a Lyapunov-based stability analysis allowed exhibiting sufficient conditions for ensuring its stability. Experimental results have validated the theoretical results obtained and shown the high robustness of visual servoing for this sort of robots [30], [56].
Visual Exploration of an Indoor Environment
Participants : Benoît Antoniotti, Eric Marchand, François Chaumette.
This study is done in collaboration with the Creative company in Rennes (see Section 6.2.9). It is devoted to the exploration of indoor environments by a mobile robot, Pepper typically (see Section 5.4.2) for a complete and accurate reconstruction of the environment. The exploration strategy we are currently developing is based on maximizing the entropy generated by a robot motion.
Deformation Servoing of Soft Objects
Participant : Alexandre Krupa.
Nowadays robots are mostly used to manipulate rigid objects. Manipulating deformable objects remains challenging due to the difficulty of accurately predicting the object deformations. This year, we developed a model-free deformation servoing method able to do an online estimation of the deformation Jacobian that relates the motion of the robot end-effector to the deformation of a manipulated soft object. The first experimental results are encouraging since they showed that our model-free visual servoing approach based on online estimation provides similar results than a model-based approach based on physics simulation that requires accurate knowledge of the physical properties of the object to deform. This approach has been recently submitted to the ICRA'20 conference.
Multi-Robot Formation Control
Participant : Paolo Robuffo Giordano.
Most multi-robot applications must rely on relative sensing among the robot pairs (rather than absolute/external sensing such as, e.g., GPS). For these systems, the concept of rigidity provides the correct framework for defining an appropriate sensing and communication topology architecture. In several previous works we have addressed the problem of coordinating a team of quadrotor UAVs equipped with onboard sensors (such as distance sensors or cameras) for cooperative localization and formation control under the rigidity framework. In [9] an interesting interplay between the rigidity formalism and notions of parallel robotics has been studied, showing how well-known tools from the parallel robotics community can be applied to the multi-robot case, and how these tools can be used for characterizing the stability and singularities of the typical formation control/localization algorithms.
In [17], the problem of distributed leader selection has been addressed by considering agents with a second-order dynamics, thus closer to physical robots that have some unavoidable inertia when moving. This work has extended a previous strategy developed for a first-order case and ported it to the second-order: the proposed algorithm is able to periodically select at runtime the `best' leader (among the neighbors of the current leader) for maximizing the tracking performance of an external trajectory reference while maintaining a desired formation for the group. The approach has been validated via numerical simulations.
Coupling Force and Vision for Controlling Robot Manipulators
Participants : Alexander Oliva, François Chaumette, Paolo Robuffo Giordano.
The goal of this activity is about coupling visual and force information for advanced manipulation tasks. To this end, we plan to exploit the recently acquired Panda robot (see Sect. 5.4.4), a state-of-the-art 7-dof manipulator arm with torque sensing in the joints, and the possibility to command torques at the joints or forces at the end-effector. Thanks to this new robot, we plan to study how to optimally combine the torque sensing and control strategies that have been developed over the years to also include in the loop the feedback from a vision sensor (a camera). In fact, the use of vision in torque-controlled robot is quite limited because of many issues, among which the difficulty of fusing low-rate images (about 30 Hz) with high-rate torque commands (about 1 kHz), the delays caused by any image processing and tracking algorithms, and the unavoidable occlusions that arise when the end-effector needs to approach an object to be grasped.
Towards this goal, this year we have considered the problem of identification of the dynamical model for the Panda robot [18], by suitably exploiting tools from identification theory. The identified model has been validated in numerous tests on the real robot with very good results and accuracy. A special feature of the model is the inclusion of a (realistic) friction term that accounts well for joint friction (a term that is usually neglected in dynamical model identification).
Subspace-based visual servoing
Participant : Eric Marchand.
To date most of visual servoing approaches have relied on geometric features that have to be tracked and matched in the image. Recent works have highlighted the importance of taking into account the photometric information of the entire images. This leads to direct visual servoing (DVS) approaches. The main disadvantage of DVS is its small convergence domain compared to conventional techniques, which is due to the high non-linearities of the cost function to be minimized. We proposed to project the image on an orthogonal basis (PCA) and then servo on either images reconstructed from this new compact set of coordinates or directly on these coordinates used as visual features [23]. In both cases we derived the analytical formulation of the interaction matrix. We show that these approaches feature a better behavior than the classical photometric visual servoing scheme allowing larger displacements and a satisfactory decrease of the error norm thanks to a well modelled interaction matrix.
Wheelchair Autonomous Navigation for Fall Prevention
Participants : Solenne Fortun, Marie Babel.
The Prisme project (see Section 8.1.4) is devoted to fall prevention and detection of inpatients with disabilities. For wheelchair users, falls typically occur during transfer between the bed and the wheelchair and are mainly due to a bad positioning of the wheelchair. In this context, the Prisme project addresses both fall prevention and detection issues by means of a collaborative sensing framework. Ultrasonic sensors are embedded onto both a robotized wheelchair and a medical bed. The measured signals are used to detect fall and to automatically drive the wheelchair near the bed at an optimal position determined by occupational therapists. This year, we finalized the related control framework based on sensor-based servoing principles. We validated the proposed solution through usage tests within the Rehabilitation Center of Pôle Saint Hélier (Rennes).